Multithreaded Programming (POSIX pthreads Tutorial)
Introduction
Code is often written in a serialized (or sequential) fashion. What
is meant by the term serialized? Ignoring instruction level parallelism (ILP),
code is executed sequentially, one after the next in a monolithic
fashion, without regard to possibly more available processors the program
could exploit. Often, there are potential parts of a program where
performance can be improved through the use of threads.
With increasing popularity of machines with symmetric multiprocessing
(largely due in part to the rise of multicore processors), programming
with threads is a valuable skill set worth learning.
Why is it that most programs are sequential? One guess would be that
students are not taught how to program in a parallel fashion until
later or in a difficult-to-follow manner.
To make matters worse, multithreading non-trivial code is difficult.
Careful analysis of the problem, and then a good design is not an option
for multithreaded programming; it is an absolute must.
We will dive into the world of threads with a little bit of background
first. We will examine thread synchronization primitives and then a
tutorial on how to use POSIX pthreads will be presented.
What is a Thread?
Analogy
Isn't that something you put through an eye of a sewing needle?
Yes.
How does it relate to programming then?
Think of sewing needles as the processors and the threads in a program
as the thread fiber. If you had two needles but only one thread, it
would take longer to finish the job (as one needle is idle) than if you
split the thread into two and used both needles at the same time.
Taking this analogy a little further, if one needle had to
sew on a button (blocking I/O), the other needle could continue doing
other useful work even if the other needle took 1 hour to sew on a single
button. If you only used one needle, you would be ~1 hour behind!
Definition
In order to define a thread formally, we must first understand the
boundaries of where a thread operates.
A computer program becomes a process when it is loaded from some
store into the computer's memory and begins execution. A process can
be executed by a processor or a set of processors. A process
description in memory contains vital information such as the program
counter which keeps track of the current position in the program
(i.e. which instruction is currently being executed), registers,
variable stores, file handles, signals, and so forth.
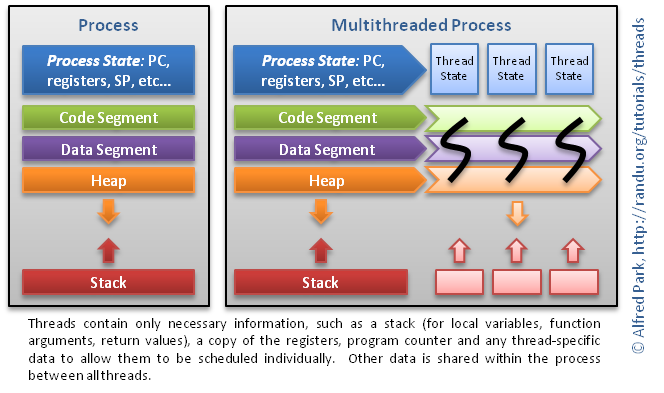
A thread is a sequence of such instructions within a program
that can be executed independently of other code.
The figure to the right conceptually shows that threads are within the
same process address space, thus, much of the information
present in the memory description of the process can be shared across
threads.
Some information cannot be replicated, such as the stack (stack
pointer to a different memory area per thread), registers and
thread-specific data. This information sufficies to allow threads to
be scheduled independently of the program's main thread and possibly
one or more other threads within the program.
Explicit operating system support is required to run multithreaded
programs. Fortunately, most modern operating systems support threads
such as Linux (via NPTL), BSD variants, Mac OS X, Windows, Solaris,
AIX, HP-UX, etc. Operating systems may use different mechanisms to
implement multithreading support.
|
|
|
Terminology
Before we can dive in depth into threading concepts, we need to get
familiarized with a few terms related to threads, parallelism and
concurrency.
- Lightweight Process (LWP) can be thought of as a virtual CPU
where the number of LWPs is usually greater than the number of CPUs in the
system. Thread libraries communicate with LWPs to schedule threads. LWPs
are also sometimes referred to as kernel threads.
- X-to-Y model. The mapping between LWPs and Threads. Depending
upon the operating system implementation and/or user-level thread library
in use, this can vary from 1:1, X:1, or X:Y. Linux, some BSD kernels,
and some Windows versions use the 1:1 model. User-level threading
libraries are commonly in the X:1 class as the underlying kernel does
not have any knowledge of the user-level threads. The X:Y model is
used in Windows 7.
- Contention Scope is how threads compete for system resources
(i.e. scheduling).
- Bound threads have system-wide contention scope, in other
words, these threads contend with other processes on the entire
system.
- Unbound threads have process contention scope.
- Thread-safe means that the program protects shared data,
possibly through the use of mutual exclusion.
- Reentrant code means that a program can have more than one
thread executing concurrently.
- Async-safe means that a function is reentrant while handling
a signal (i.e. can be called from a signal handler).
- Concurrency vs. Parallelism - They are not the same!
Parallelism implies simultaneous running of code (which is not possible,
in the strict sense, on uniprocessor machines) while concurrency implies
that many tasks can run in any order and possibly in parallel.
Amdahl's Law and the Pareto Principle
Threads can provide benefits... for the right applications! Don't
waste your time multithreading a portion of code or an entire program
that isn't worth multithreading.
Gene Amdahl argued the theoretical maximum improvement that is possible
for a computer program that is parallelized, under the premise that
the program is strongly scaled (i.e. the program operates on a fixed
problem size). His claim is a well known assertion known as
Amdahl's Law.
Essentially, Amdahl's law states that the speedup of a program due
to parallelization can be no larger than the inverse of the portion
of the program that is immutably sequential. For example, if 50% of
your program is not parallelizable, then you can only expect a maximum
speedup of 2x, regardless the number of processors you throw at the
problem. Of course many problems and data sets that parallel programs
process are not of fixed size or the serial portion can be very close
to zero. What is important to the reader here, is to understand that
most interesting problems that are solved by computer programs tend to
have some limitations in the amount of parallelism that can be effectively
expressed (or introduced by the very mechanism to parallelize) and
exploited as threads or some other parallel construct.
It must be underscored how important it is to understand the problem
the computer program is trying to solve first, before simply jumping in
head first. Careful planning and consideration of not only what the
program must attack in a parallel fashion and the means to do so by way
of the algorithms employed and the vehicle for which they are delivered
must be performed.
There is a common saying: "90% of processor cycles are spent in 10% of
the code." This is more formally known as the Pareto Principle.
Carefully analyze your code or your design plan; don't spend all of
your time optimizing/parallelizing the 90% of the code that doesn't matter
much! Code profiling and analysis is outside of the scope of this document,
but it is recommended reading left to those unfamiliar with the subject.
Thread Design Patterns
There are different ways to use threads within a program. Here, three
common thread design patterns are presented. There is no hard and fast
rule on which is the best. It depends on what the program is intended
to tackle and in what context. It is up to you to decide which best
pattern or patterns fit your needs.
Thread Pool (Boss/Worker)
One thread dispatches other threads to do useful work which are usually
part of a worker thread pool. This thread pool is usually
pre-allocated before the boss (or master) begins dispatching threads to
work. Although threads are lightweight, they still incur overhead when
they are created.
Peer (Workcrew)
The peer model is similar to the boss/worker model except once the worker
pool has been created, the boss becomes the another thread in the thread
pool, and is thus, a peer to the other threads.
Pipeline
Similar to how pipelining works in a processor, each thread is part of
a long chain in a processing factory. Each thread works on data processed
by the previous thread and hands it off to the next thread. You must be
careful to equally distribute work and take extra steps to ensure
non-blocking behavior in this thread model or you could experience
pipeline "stalls."
Protecting Shared Resources
Threads may operate on disparate data, but often threads may have to
touch the same data. It is unsafe to allow concurrent access to such
data or resources without some mechanism that defines a protocol for
safe access! Threads must be explicitly instructed to block when
other threads may be potentially accessing the same resources.
Mutual Exclusion
Mutual exclusion is the method of serializing access to shared
resources. You do not want a thread to be modifying a variable that is
already in the process of being modified by another thread! Another
scenario is a dirty read where the value is in the process of being
updated and another thread reads an old value.
Mutual exclusion allows the programmer to create a defined
protocol for serializing access to shared data or resources.
Logically, a mutex is a lock that one can virtually
attach to some resource. If a thread wishes to modify or read a value
from a shared resource, the thread must first gain the lock. Once it
has the lock it may do what it wants with the
shared resource without concerns of other threads accessing the shared
resource because other threads will have to wait. Once the thread finishes
using the shared resource, it unlocks the mutex, which allows other
threads to access the resource. This is a protocol that serializes access
to the shared resource. Note that such a protocol must be enforced for
the data or resource a mutex is protecting across all threads that may
touch the resource being protected. If the protocol is violated (e.g.,
a thread modifies a shared resource without first requesting a mutex
lock), then the protocol defined by the programmer has failed. There
is nothing preventing a thread programmer, whether unintentionally
(most often the case, i.e., a bug -- see race conditions below) or
intentionally from implementing a flawed serialization protocol.
As an analogy, you can think of a mutex as a safe with only one key
(for a standard mutex case), and the resource it is protecting lies
within the safe. Only one person can have the key to the chest at any
time, therefore, is the only person allowed to look or modify the
contents of the chest at the time it holds the key.
The code between the lock and unlock calls to the mutex, is referred to
as a critical section. Minimizing time spent in the critical
section allows for greater concurrency because it potentially reduces the
amount of time other threads must wait to gain the lock. Therefore, it is
important for a thread programmer to minimize critical sections
if possible.
Mutex Types
There are different types of locks other than the standard simple
blocking kind.
- Recursive: allows a thread holding the lock to acquire the
same lock again which may be necessary for recursive algorithms.
- Queuing: allows for fairness in lock acquisition by
providing FIFO ordering to the arrival of lock requests. Such mutexes
may be slower due to increased overhead and the possibility of having to
wake threads next in line that may be sleeping.
- Reader/Writer: allows for multiple readers to acquire the
lock simultaneously. If existing readers have the lock, a writer request
on the lock will block until all readers have given up the lock. This
can lead to writer starvation.
- Scoped: RAII-style semantics regarding lock acquisition and
unlocking.
Depending upon the thread library or interface being used, only a subset
of the additional types of locks may be available. POSIX pthreads
allows recursive and reader/writer style locks.
Potential Traps with Mutexes
An important problem associated with mutexes is the possibility of
deadlock. A program can deadlock if two (or more) threads have
stopped execution or are spinning permanently. For example, a simple
deadlock situation: thread 1 locks lock A, thread 2 locks lock B,
thread 1 wants lock B and thread 2 wants lock A. Instant deadlock. You
can prevent this from happening by making sure threads acquire locks
in an agreed order (i.e. preservation of lock ordering). Deadlock
can also happen if threads do not unlock mutexes properly.
A race condition is when non-deterministic behavior results from
threads accessing shared data or resources without following a defined
synchronization protocol for serializing such access. This can result
in erroneous outcomes that cause failure or inconsistent behavior making
race conditions particularly difficult to debug. In addition to
incorrectly synchronized access to shared resources, library calls
outside of your program's control are common culprits. Make sure you take
steps within your program to enforce serial access to shared file
descriptors and other external resources. Most man pages will contain
information about thread safety of a particular function, and if it
is not thread-safe, if any alternatives exist (e.g.,
gethostbyname() and gethostbyname_r()).
Another problem with mutexes is that contention for a mutex can lead to
priority inversion. A higher priority thread can wait behind a lower
priority thread if the lower priority thread holds a lock for which the
higher priority thread is waiting. This can be eliminated/reduced by
limiting the number of shared mutexes between different priority threads.
A famous case of priority inversion occurred on the
Mars Pathfinder.
Atomic Operations
Atomic operations allow for concurrent algorithms and access to certain
shared data types without the use of mutexes. For example, if there is
sufficient compiler and system support, one can modify some variable
(e.g., a 64-bit integer) within a multithreaded context without having to
go through a locking protocol. Many atomic calls are non-portable and
specific to the compiler and system. Intel Threading Building Blocks
(see below), contains semi-portable atomic support
under C++. The C++1x and C1x standards will also include atomic
operations support. For gcc-specific atomic support, please see
this
and this.
Lock-free algorithms can provide highly concurrent and scalable operations.
However, lock-free algorithms may be more complex than their lock-based
counterparts, potentially incurring additional overhead that may induce
negative cache effects and other problems. Careful analysis and
performance testing is required for the problem under consideration.
Thread Synchronization Primitives
As we have just discussed, mutexes are one way of synchronizing access
to shared resources. There are other mechanisms available for not only
coordinating access to resources but synchronizing threads.
Join
A thread join is a protocol to allow the programmer to collect
all relevant threads at a logical synchronization point. For example,
in fork-join parallelism, threads are spawned to tackle parallel tasks
and then join back up to the main thread after completing their
respective tasks (thus performing an implicit barrier at the join point).
Note that a thread that executes a join has terminated execution of their
respective thread function.
Condition Variables
Condition variables allow threads to synchronize to a value of a shared
resource. Typically, condition variables are used as a notification
system between threads.
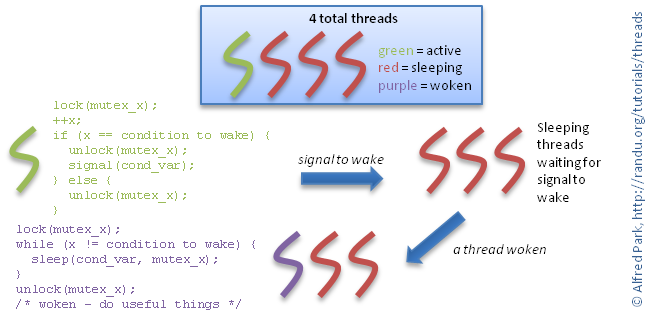
For example, you could have a counter that once reaching a certain
count, you would like for a thread to activate. The thread (or threads)
that activates once the counter reaches the limit would wait on
the condition variable. Active threads signal on this condition
variable to notify other threads waiting/sleeping on this condition
variable; thus causing a waiting thread to wake. You can also use a
broadcast mechanism if you want to signal all threads
waiting on the condition variable to wakeup. Conceptually, this is
modeled by the figure on the right with pseudocode.
When waiting on condition variables, the wait should be inside a loop, not
in a simple if statement because of spurious wakeups. You are not
guaranteed that if a thread wakes up, it is the result of a signal or
a broadcast call.
|
|
|
Barriers
Barriers are a method to synchronize a set of threads at some point in
time by having all participating threads in the barrier wait until all
threads have called the said barrier function. This, in essence, blocks
all threads participating in the barrier until the slowest participating
thread reaches the barrier call.
Spinlocks
Spinlocks are locks which spin on mutexes. Spinning refers to
continuously polling until a condition has been met. In the case of
spinlocks, if a thread cannot obtain the mutex, it will keep polling the
lock until it is free. The advantage of a spinlock is that the thread is
kept active and does not enter a sleep-wait for a mutex to become
available, thus can perform better in certain cases than typical
blocking-sleep-wait style mutexes. Mutexes which are heavily contended
are poor candidates for spinlocks.
Spinlocks should be avoided in uniprocessor contexts. Why is this?
Semaphores
Semaphores are another type of synchronization primitive that come in two
flavors: binary and counting. Binary semaphores act much like simple
mutexes, while counting semaphores can behave as recursive mutexes.
Counting semaphores can be initialized to any arbitrary value which
should depend on how many resources you have available for that particular
shared data. Many threads can obtain the lock simultaneously until the
limit is reached. This is referred to as lock depth.
Semaphores are more common in multiprocess programming (i.e. it's usually
used as a synch primitive between processes).
POSIX pthreads
Now that we have a good foundation of thread concepts, lets talk about a
particular threading implementation, POSIX pthreads. The pthread library
can be found on almost any modern POSIX-compliant OS (and even under
Windows, see
pthreads-win32).
Note that it is not possible to cover more than an introduction on pthreads
within the context of this short overview and tutorial. pthreads concepts
such as thread scheduling classes, thread-specific data, thread canceling,
handling signals and reader/writer locks are not covered here. Please see
the Resources section for more information.
If you are programming in C++, I highly recommend evaluating the
Boost C++ Libraries. One of the
libraries is the
Thread library
which provides a common interface for portable multithreading.
It is assumed that you have a good understanding of the C
programming language. If you do not or need to brush up, please review
basic C (especially pointers and arrays). Here are some
resources.
Preliminaries
Before we begin, there are a few required steps you need to take before
starting any pthreads coding:
- Add
#include <pthread.h> to your source file(s).
- If you are using gcc, you can simply specify
-pthread
which will set all proper defines and link-time libraries. On other
compilers, you may have to define _REENTRANT
and link against -lpthread.
- Optional: some compilers may require defining
_POSIX_PTHREAD_SEMANTICS for certain function calls
like sigwait().
Creating pthreads
A pthread is represented by the type pthread_t. To create a
thread, the following function is available:
Let's digest the arguments required for pthread_create():
pthread_t *thread: the actual thread object that contains
pthread idpthread_attr_t *attr: attributes to apply to this
threadvoid *(*start_routine)(void *): the function this thread
executesvoid *arg: arguments to pass to thread function above
Before we dive into an example, let's first look at two other important
thread functions:
pthread_exit() terminates the thread and provides the pointer
*value_ptr available to any pthread_join()
call.
pthread_join() suspends the calling thread to wait for
successful termination of the thread specified as the first argument
pthread_t thread with an optional *value_ptr
data passed from the terminating thread's call to
pthread_exit().
Let's look at an example program exercising the above pthread functions:
This program creates NUM_THREADS threads and prints their
respective user-assigned thread id. The first thing to notice is the
call to pthread_create() in the main function. The syntax
of the third and fourth argument are particularly important. Notice that
the thr_func is the name of the thread function, while the
fourth argument is the argument passed to said function. Here we are
passing a thread function argument that we created as a
thread_data_t struct. Of course, you can pass simple
data types as pointers if that is all that is needed, or NULL
if no arguments are required. However, it is good practice to be able
to pass arguments of arbitrary type and size, and is thus illustrated
for this purpose.
A few things to mention:
- Make sure you check the return values for all important functions.
- The second argument to
pthread_create() is
NULL indicating to create a thread with default
attributes. The defaults vary depend upon the system and pthread
implementation.
- Notice that we have broken apart the
pthread_join()
from the pthread_create(). Why is it that you should not
integrate the pthread_join() in to the thread creation
loop?
- Although not explicitly required to call
pthread_exit()
at the end of the thread function, it is good practice to do so,
as you may have the need to return some arbitrary data back to the
caller via pthread_join().
pthread Attributes
Threads can be assigned various thread attributes at the time of thread
creation. This is controlled through the second argument to
pthread_create(). You must first pass the
pthread_attr_t variable through:
Some attributes that can be set are:
Attributes can be retrieved via complimentary get functions.
Consult the man pages for the effect of each of these attributes.
pthread Mutexes
pthread mutexes are created through the following function:
The pthread_mutex_init() function requires a
pthread_mutex_t variable to operate on as the first
argument. Attributes for the mutex can be given through the second
parameter. To specify default attributes, pass NULL as the
second parameter. Alternatively, mutexes can be initialized to default
values through a convenient macro rather than a function call:
Here a mutex object named lock is initialized to the default
pthread mutex values.
To perform mutex locking and unlocking, the pthreads provides the following
functions:
Each of these calls requires a reference to the mutex object. The
difference between the lock and trylock calls is that lock is blocking
and trylock is non-blocking and will return immediately even if gaining
the mutex lock has failed due to it already being held/locked. It is
absolutely essential to check the return value of the trylock call to
determine if the mutex has been successfully acquired or not. If it has
not, then the error code EBUSY will be returned.
Let's expand the previous example with code that uses mutexes:
In the above example code, we add some shared data called
shared_x and ensure serialized access to this variable
through a mutex named lock_x. Within the
thr_func() we call pthread_mutex_lock()
before reading or modifying the shared data. Note that we continue
to maintain the lock even through the printf() function
call as releasing the lock before this and printing can lead to
inconsistent results in the output. Recall that the code in-between
the lock and unlock calls is called a critical section. Critical sections
should be minimized for increased concurrency.
pthread Condition Variables
pthread condition variables are created through the following function
call or initializer macro similar to mutexes:
Similar to the mutex initialization call, condition variables can be
given non-default attributes through the second parameter. To specify
defaults, either use the initializer macro or specify NULL
in the second parameter to the call to pthread_cond_init().
Threads can act on condition variables in three ways: wait,
signal or broadcast:
pthread_cond_wait() puts the current thread to sleep. It
requires a mutex of the associated shared resource value it is waiting
on. pthread_cond_signal() signals one thread out of the
possibly many sleeping threads to wakeup.
pthread_cond_broadcast() signals all threads waiting
on the cond condition variable to wakeup. Here is an
example on using pthread condition variables:
In thr_func1(), we are locking the count_lock
mutex so we can read the value of count without entering a potential race
condition. The subsequent pthread_cond_wait() also requires a
locked mutex as the second parameter to avoid a race condition where a
thread prepares to wait on a condition variable and another thread
signals the condition just before the first thread actually waits on it
(as explained from the man page on pthread_cond_wait). Notice
how a while loop is used instead of an if
statement for the pthread_cond_wait() call. This is because
of spurious wakeups problem mentioned previously. If a thread has been
woken, it does not mean it was due to a
pthread_cond_signal() or
pthread_cond_broadcast() call.
pthread_cond_wait() if awoken, automatically
tries to re-acquire the mutex, and will block if it cannot.
Locks that other threads could be waiting on should be released
before you signal or broadcast.
pthread Barrier
pthreads can participate in a barrier to synchronize to some point in
time. Before a barrier can be called, a pthread barrier object must be
initialized first:
Barrier objects are initialized like mutexes or condition variables,
except there is one additional parameter, count. The count
variable defines the number threads that must join the barrier for the
barrier to reach completion and unblock all threads waiting at the barrier.
If default barrier attributes are used (i.e. NULL for
the second parameter), one can use the initializer macro with the
specified count.
The actual barrier call follows:
This function would be inside thread code where the barrier is to take
place. Once count number of threads have called
pthread_barrier_wait() then the barrier condition is met
and all threads are unblocked and progress continues.
Miscellaneous
Here are some suggestions and issues you should consider when using
pthreads:
- You should check all return values for important pthread function
calls!
- Sometimes it is desirable for a thread not to terminate (e.g., a
server with a worker thread pool). This can be solved by placing the
thread code in an infinite loop and using condition variables. Of
course, there needs to be some terminating condition(s) to the
infinite loop (i.e.,
break when it is deemed
necessary).
Additional useful pthread calls:
pthread_kill() can be used to deliver signals to
specific threads.pthread_self() returns a handle on the calling
thread.pthread_equal() compares for equality between two pthread
idspthread_once() can be used to ensure that an
initializing function within a thread is only run once.- There are many more useful functions in the pthread library.
Consult pthreads man pages or the Nichols text (Appendix C).
The performance gains from using threads can be substantial when done
properly and in the right problem context, but can it be even better? You
should consider the following when analyzing your program for potential
bottlenecks:
- Lock granularity - How "big" (coarse) or "small" (fine)
are your mutexes? Do they lock your whole structure or fields of
a structure? The more fine-grained you make your locks, the more
concurrency you can gain, but at the cost of more overhead and
potential deadlocks.
- Lock ordering - Make sure your locks are always locked in
an agreed order (if they are not, make sure you take steps to rectify
situations where locks are obtained in an out-of-order fashion, e.g.
by using trylock/unlock calls).
- Lock frequency - Are you locking too often? Locking at
unnecessary times? Reduce such occurences to fully exploit
concurrency and reduce synchronization overhead.
- Critical sections - This has been mentioned before,
but you should take extra steps to minimize critical sections which
can be potentially large bottlenecks.
- Worker thread pool - If you are using a Boss/Worker thread
model, make sure you pre-allocate your threads instead of creating
threads on demand. It doesn't matter to the user how long it took your
server to initialize, it only matters how fast it processes his or
her request!
- Contention scope - Do your threads perform better when they
are in contention with all of the system's processes? Or do they
perform better when individually scheduled by the thread library
itself? Only experimentation can give you the answers.
- Scheduling class - We have not touched on this topic, but
changing the thread scheduling class from FIFO to RR can give better
response times. But is this what you really want? Refer to Nichols or
Lewis book for more information on thread scheduling classes.
- Too many threads? - At what point are there too many
threads? Can it serverely impact and degrade performance? Again, only
experimentation will give you the real answers to this question.
Other Approaches
C++ Template Libraries
There are various template libraries available that ease implementation
of multithreading in a (semi-)portable fashion. For those programming
in C++, you may want to look at Boost,
Intel Threading Building
Blocks (TBB) and POCO.
Multiprocess and Shared Memory
This tutorial has explored the very basics of multithreaded programming.
What about multiprocess programming?
These topics are beyond the scope of this document, but to perform
cross-process synchronization, one would use some form of IPC: pipes,
semaphores, message queues, or shared memory. Of all of the forms of
IPC, shared memory is usually the fastest (excluding doors). You can use
mmap(), POSIX (e.g., shm_open()) or SysV
(e.g., shmget()) semantics when dealing with cross-process
resource management, IPC and synchronization. For those interested
in shared memory programming in C++, I recommend looking at
Boost.Interprocess
first.
OpenMP
OpenMP is a portable interface for
implementing fork-join parallelism on shared memory multi-processor
machines. It is available for C/C++ and Fortran. For a quick introduction,
please see the slides here.
MPI
The Message
Passing Interface (MPI) is the de-facto standard for distributed
memory parallel processing. Data can be sent/received from distinct
computing machines with support for vectored I/O (scatter/gather),
synchronization and collectives.
It is not uncommon to see programs that are both multithreaded and
contain MPI calls to take advantage of shared memory within a node and
MPI to perform processing across nodes.
Resources
It is difficult to cover more than an introduction to threads with this
short tutorial and overview. For more in-depth coverage on threads (like
thread scheduling classes, thread-specific data (thread local storage),
thread canceling, handling signals and reader/writer locks) and pthreads
programming, I recommend these books:
- Lewis, Bill and Daniel J. Berg.
Multithreaded Programming with Pthreads. California: Prentice
Hall, 1998.
- Nichols, Bradford, et. al. Pthreads Programming. Beijing:
O'Reilly & Associates, Inc., 1998.
There are many excellent online resources regarding pthreads on the web.
Use your favorite search engine to find these.
Notice: Please do not replicate or copy these pages and
host them elsewhere. This is to ensure that the latest version can always
be found here.
Disclaimer: The document author has published these pages
with the hope that it may be useful to others. However, the document
author does not guarantee that all information contained on these
webpages are correct or accurate. There is no warranty, expressed or
implied, of merchantability or fitness for any purpose. The author does
not assume any liability or responsibility for the use of the information
contained on these webpages.
If you see an error, please send an email to the address below indicating
the error. Your feedback is greatly appreciated and will help to
continually improve these pages.
© 1999-2026 Alfred Park (fred
[ANTISPAM-REMOVE-THIS] AT randu.org)

